



��������
���ٵIJ���λ�ñ仯
�ӹ���еλ��ϵͳ�����ܲ��������Լ����˻�������Ҫ���ٵļ�¼λ�����ݣ�Ҳ��Ҫ���ٵ�ʶ����κα仯��
�߷ֱ��ʱ�������դ��ͨ��һ���������ӿڷ���λ�����ݸ��������ġ�ѡ�������ӿڱ���������Ƶ�Ԫ��ʱ���Ҫ��������ߣ�ӵ��̫��ı������ӿڿɹ�ѡ��������ʹ��ѡ��������ӿڵ����������������һ���ĸ��ӡ�
������Щ�ڶ��ר�����ֽӿڣ�Ҳ��һЩ���ŵı��ӿڣ����磬SSI��BiSS�ӿ����ھ���λ�ö�ȡ��Ȼ������������ϵĻ�һ���dz��ߵ�λ�÷ֱ��ʱ仯��Ҫһ�����ٵIJ��������ݽӿڵ��������������ġ�
��Ϊ��һ��ѡ���кܶഫͳ�Ŀ��ű������ӿڿɹ�����λ�����ݣ�����ʹ������/�����źŻ�������A/B�źŴ���λ�����ݶ��ܺá�
��������������ⷽ����������ѡ���Լ����еĽ��������
Ŀ¼
1.ѡ��������ӿ�
2.ʹ�õ�ǰֵ���ٿ���
3.���������Dz����ģ�
4.����һ�����ٱ������ӿ�
5.ժҪ

ѡ��������ӿ�
��ʹ�ÿ���������PLC������/��ת��������ϵͳ�е���һ���ӿ�ģ�飨��ͼ1�����ܶ�����������ṩһ����Χ��ר�л��߿�Դ�ӿڡ�
ģ��ӿ�
ģ��ӿ��Ǵ�ͳ�ķ�ר�нӿڣ�����λ����Ϣʹ��ģ���źš��ڽ��շ����ȿ���ʹ������/����ֵ���岹ϸ����ϸ�֣�Ҳ����ʹ�õ������ߵ�ѹ�źţ����磬0-20mA �� 0-10V��ȷ������λ�á������Ƿdz�ͨ�õĽӿڣ����ڼ�λ�ñ��������ڰ�ȫӦ������ģ��������/�����ź��շ���������ѡ��ģ�����źŵĴ����һʱ����Ա���������ʺ�����Ӧ�á�
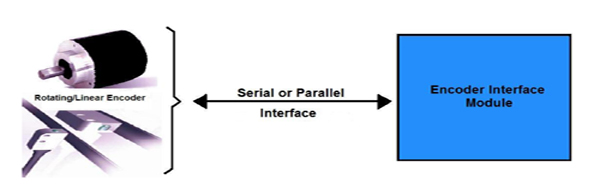
ͼ1����������PLC�ı������ӿ�
���־���ֵ�ӿ�
���Ĵ������־���λ�����ݵķ�����ͨ��һ�����нӿڡ�����ӿ�ͨ����TTL������������Ȼ�������нӿ����µijɱ��dz��ߣ���Ϊ���ԭ�����ַ��������ر��ܻ�ӭ����������Խ��Խ�����ˣ�����ʹ�ñ��ķ�ר���ֳ��������ڴ��д��䣬���磬CANopen����̫���Լ���Դ��SSI/BiSS�ӿڡ�
���������ӿ�
��һ����ͳ���б������ӿ�ʹ����������90°��A��B�ź��ṩ��������λ�ñ仯���ݣ�����������֪�������źš����⣬һ��Z�����ź��ṩ��λ�ź�������λ̽�⡣���������ӿڣ�һ�������ϵĸı���A��B�źŵ����ƻ���B��A�źŵ����Ʊ仯��ʾ��
ͼ2��ʾ����һ��������λ�õķ���ı�ʱ��ͼ�������������һ����ת�˶�����ı�ʱ�ķֱ��ʣ���һ���Ƕȣ��ͺ�1.4°����ͼ��ʾ��A��B�����ź���������̽�ⷽ���������º����ϵļ�����
����������һ��ѭ���ڣ�A/B�ź��ṩ360°�ı��أ�H��L����L��H�����������������������Щ���ص���λ���Լ���������/���¼��������������DZ�������ʱ�ľ���λ����Ϣ��

 ͼ2�������������ӿں�A,B,Z�ź�ʱ��ͼ
ͼ2�������������ӿں�A,B,Z�ź�ʱ��ͼ
�����������ӿڵ���Խ�����ڵͳɱ��Ͷ����µĵ�Ҫ���͵����ð���TTL��������������缫��·����Լ��������������TTL�������ͼ��缫��·���Ǹ��ͳɱ��Ľ�����������������ṩ������Խ�����ܡ���Щ�����ܰ�������������Ŀ������ԡ��������������������С���Ч�Ĺ��������Լ����ٴ��д������ܵ���ߡ���ֶԴ�����������ʹ��ר�õ�RS422���������ṩ���õ���Ӧ�ԡ�
����ĸı�Ҳ���Ա����ٵ�̽�⣬�ٶ��ɼIJ�������Z��λ����֮����ؾ�����ȷ����Ȼ����һ������λ�ý���һ��Z��λ���嵽��֮����Ч��������ת�˶�������λ��������һ��ѭ��֮���á�Ϊ�ˣ����Բ���ϵͳ��Ҫһ���ο�������ʼ���������ڳ������С�
ʹ�õ�ǰֵ���ٿ���
�߾���Ӧ�ú����˶������dz��ߵ�ʱ��Ƶ�ʣ��ⲻ�ò��ɽӿ�ģ�����������������ָ��ٶȺ�λ�ÿ��ƣ���ʵ�ֵĿ���ѭ�������ڹ̼����㷨��Ӳ������ʱʱ�䡣
����˵����ͼ3ͼ����һ���������ϵͳ����ɡ����˹̼���ִ��ʱ��֮�⣬���µ�Ӳ��ִ��ʱ��ҲҪ�ر�ע�⿼�ǽ�ȥ��
1. ��������ʱ���岹ϸ�����Ĵ���ʱ���A/B�źŵ������ʱ��
2. �������Ϳ��Ƶ�Ԫ/PLC֮��Ĵ���ʱ�䡣
3. ���Ƶ�Ԫ/PLC�ı������ӿ�ģ�����ʱ��
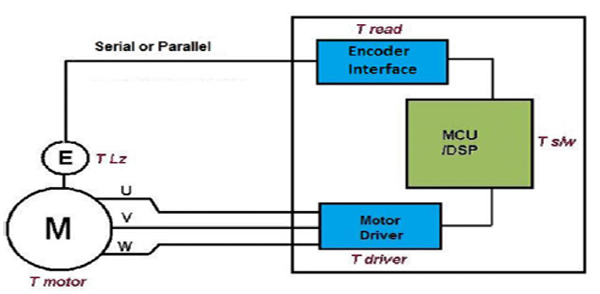
ͼ3��һ��������ƻ�·�Ķ�ʱ��ɲ���
�������ӳ�
�������ӳ٣�TLZ��������ģ��Ŵ����Ĵ��������ڲ��IJ岹ϸ�ִ������ֱ����Լ���ʹ�õı������ӿڡ�
�岹ϸ�����ӳ�
���ģ��������ź�����/���Ҳ岹ϸ����һ������MCU/DSPϵͳ���ӳ����ڿ��ܳ���200us����ࡣ�ر�Ҫע����ǵ�ʹ�ýϸ�Ƶ�ʺͷֱ��ʣ�������Эͬ������ƺ�����ϵͳ������������£��ӳٿ��Ե���λ�����ݻ������ǵ�ǰ�Ļ��߲�ͬ����Ϊӭ�������ս��һ�����ڳ������٣�flash���岹ϸ�������Ե������������磬iC-NV����iC-NV�Dz����ڲ��������ɻ����ʱ����1us�IJ岹ϸ������
�������ӿ��ӳ�
�����ô��б������ӿ�ʱ��ͨ��ֻ��������Ҫ��ɫ�������ݴ���ʱ�䡣���ڴ��д��䣬MCU/DSP�ӱ������ӿ�ģ���λ�����ݶ���ʱ��Tread��ȡ��������λ���������ٶȡ����磬SSI��10MHz���У�32λ��������ʱ��Ϊ3.2us��
���������ӿڣ��ӳ�ͨ�����Ժ��ԣ�����ʵʱ��λ���˶��������źű��ء�Ȼ��������ĸı佫����һЩ�������ӳ٣�ȡ���������źŵij��ͣ���ͼ2����
�����ӳ�
һ��λ������ͨ���������ӿڱ���ȡ�������㷨����ʱ�䣨TS/W��������ϵͳ�ӳ١��⽫�ڲ�ͬϵͳ֮������ϵͳ�����Ĵ���ʱ�����Ϊ��ͬ��ȡ����ʹ�õ�MCU����DSP�Ĺ��ܺʹ���������
����ӳ�
��λ�����ݱ���ȡ�ʹ���֮�����յ��ӳ����ڵ��������������һ���֡���������Tdriver�������ķ�Ӧʱ�䣨Tmotor�����뱻�ӵ�������ϵͳ�ӳ١�
���е���Щ��ʱʱ��ӵ�ϵͳ�ӳ٣�����ӳٻ�ֱ��Ӱ�������������ڵij���ʱ�䡣����������ҲӰ�������ʺ����������������ϵͳ�ľ��ȡ�
3���������Dz����ģ�
������ٶȺͱ������ķֱ���ȷ����������������ظ��ʡ�Ȼ������ѡ��һ����������ʱ�����һ�������������ء�
������ѡ������
��һ������Ӧ��Ϊ�����ű�����ϵͳ������iC-MH�ڷֱ���Ϊ10λʱ��������ٶȸߴ�480,000 RPM����Щ����Ҳͬ���ṩ��صĵ�������ź�UVW��
���͵ĵ���ٶ�ͨ����500��15,000RMP��Χ���ڡ�Ȼ����ͨ��Ҫ��ķֱ���Ϊ12λ�������ϡ�����������£�һ���ٶ�Ϊ120,000RPM��12λλ�÷ֱ��ʵı�����������iC-MH��ɡ�
iC-MH��һ����оƬ����ֵ�������������ṩ���ֱ������ӿڡ�������������SSI/BiSS����ӿں�һ�������ӿڡ��۽�����������źţ�A/B�źŵ����ظ��ʴ�8MHz��������һ������125ns����С�ؾ������������A/B�ź���֮�䣨��ͼ4a�����ֵ��Ӳ�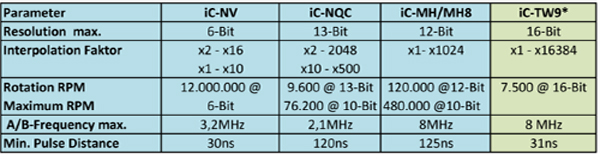
ͼ4a�������ֵ��Ӳ岹ϸ����/����������
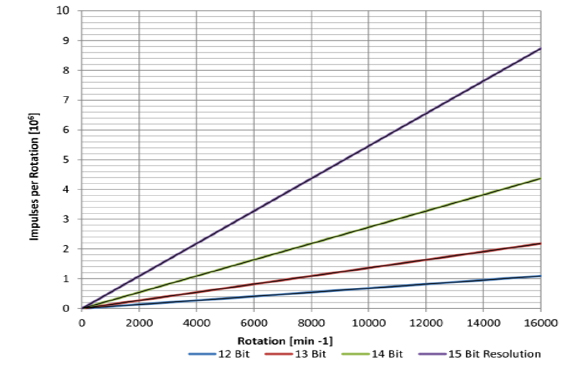
λ�����ٶ�
ͼ4b������ÿ��ת����������������ȡ�����ٶȡ���һ��15λ�ֱ����Լ�10,000RPM�ظ���ʱ�����ﵽ5.5MHz�������������ڵ���ʱ�ܻ���������ķֱ��ʡ����ŷ���ı䣬��С�ؾ���dz���Ҫ���ұ��뱻���ǽ�ȥ��
ֱ�ߵ������
���ʹ��ֱ�ߵ����ͨ��������ٶ�Ϊ����ÿ�롣������оֱ�ߵ�����������Ի�ó���7m/s���ٶȡ�
���ڹ�դ���դ�ߣ����ṩһ�����ڼ��20um������/�����źš����ɲ���һ���ֱ�������Ϊ16�IJ岹ϸ����ϸ�֣����磬����iC-NQC���ɴﵽ1.3us�ķֱ��ʡ���ֱ���ٶ�Ϊ2m/sʱ�������ظ���Ϊ1.6MHz��
���������ظ��ʺ�A/B�źŵ���С�ؼ��֮�⣬�ڿ����ڼ�ҲҪ����������⼸���棺
����λ����tXʱ��ͬ���洢
���ٶȲ���
��A/B�źŴ����ڼ���ʧ��/���
�ɱ�̼������ij���Ҫ���ǵ���ͬ�IJ�������
���˺Ͳ�����ַ�������A��B��Z�ź�
4������һ�����������ӿ�
���������������ö��ֲ�ͬ�ķ������ӣ����ڷdz��������˶���ʹ��MCU�Ĺ̼���һ���ж��������ź��ؼ��ɡ�
���ʹ��һ���ⲿ���������������ʹ��һ�����ɵ�MCU�ڲ��ķ������������KHzƵ�ʵ�A/B�ź�Ҳ����MCU���ڲ���ʱ��/��������ʤ�δ�ɨ�������ڹ�ҵ������/�������ϵͳ��FPGAҲ�������������������Ľӿڡ�ȡ���ڴ˴������Ĺ��ܣ���Щ�ⷽ���һЩϵͳ�о����Լ����ܴ�����Ƶ�ʵı�������Ȼ���������¿�����Ƕ��ʽ��������ר�õı���������������������߽�������͵������ս��
iC-MD��һ�������͵ı�����������������ͼ5��ʾ���������ṩһ����ȫ�������������ӿںͼ��ɵIJ��RS422�߽�������iC-MDҲ�������ӵ�һ��SPI�ӿڻ���һ��SSI/BiSS�ӿڡ�
iC-MD���ɵķ������������ɱ�̳��ȵ�ͬ������/���¼��������������ߴ�3��ͨ����ÿ��ͨ�������øߴ�16λ����������Ϊ����24λ����������������Ϊһ��32λ����������������Ϊһ��48λ��������
������������֮�䣬һ��24λ�ο�����������A/B�źŵ�����Ŀ��ͬʱʹ������24λ�Ĵ������������������볤�Ȳο���ǡ��ۼӵIJο�������ֵҲ�����ÿ��������߱���MCU/DSP�������ٶȻ����ٶȡ�
һ������Ϊ40MHz�ı�������������Ƶ��Ҫ�㹻֧��һ��С��25ns���ؼ������һ��24λ��������λ�ÿ��Դ洢�Լ���ͨ��һ���ⲿ�¼��ӽӴ�ʽ̽�����ţ�TP������������ͨ��iC-MD��SPI/BiSS�ӿڶ�����
��һ�����������Ӧ���У����������������tXʱ��ͬ���洢���е�λ����Ϣ�� �Լ�˳�����������ʱʱ�䡣
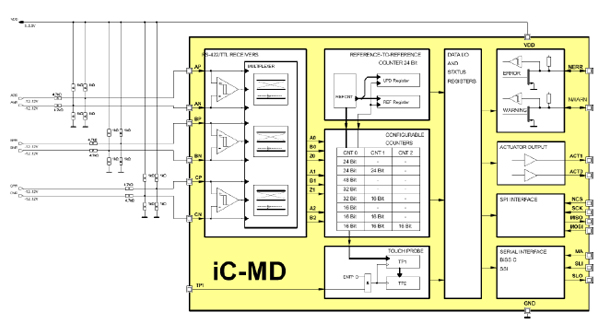

ͼ5��3ͨ�������������ӿڴ����RS422������
A/B��λ��Ҳ��iC-MD��أ����ұ����MCU/DSP�������������ѹ��ͨ��һ�����������NERR�����������������������������������������iC-MD�����NWARN�л����͵�ƽ����־��
��Щ���������˫��IJ���Ҳ��iC-MD��Ϊһ���ⲿ��Ϣ���洢�Լ�����״̬����ͨ��SPI/BiSS�ӿڶ���������ִ���������ACT0/1������������MCU/DSP��Ϊ�ź���������磬����LED״ָ̬ʾ��������Ϊ���ء�
�����ǵ��ܶ�������ӿ��������������սʱ���������Ե��Ǹ������ս�������ñ�����������������iC-MD���ܶ�ܿ��Դ�һ���Ѿ����ڵ�MCU/DSPƽ̨��á�����������⽫�����ϵͳ�ĸ����Լ���ߺܶ����ܺ���Ӧ�����ﵽ����ϵͳ��Ƶ�Ҫ��
5����Ҫ
��δ���ļ������Ҫ���̵Ļ��������ٶȺ����ܵIJ�Ʒ������Ϊ����ϵͳ��������λ�ô�����Ҳ����Ϊһ����Ҫ����ս��
������Եļ��ɵ�·���籾�ĵ�������ӣ����������Գɱ�Ч��ķ�ʽ�����ЩҪ��δ���ı�����iC�з�������ʱ�����ʸߴ�100MHz���Ա���ߵľ��ȿ��Ա����ٺͿɿ��IJ�����
